mixpace HoloLens 2 / iPadアプリをより快適にご利用いただくコツをご紹介します。
3. ARマーカーは見たいエリアと利用者の間に配置しましょう
6. (HoloLens 2)黒色の部分は透明になるので濃い灰色に置き換えましょう
7. (HoloLens 2)周辺環境が明るい場合は輝度を上げましょう
【対象デバイス】
| :HoloLens 2 | |
| :iPad |
※説明図内ではiPadを使用してご説明しておりますが、HoloLens 2も同様となります。
1. 対象となる空間の特徴点を意識しましょう
HoloLens 2やiPadは環境認識用のカメラや深度センサーを用いてトラッキング(自己位置推定)をしています。
カメラが捉えた画像に含まれる特徴点を認識するため、凹凸やディテールの少ない環境や十分な明るさが無い部屋、一面の白い壁にカメラを向けた場合などではデバイスが十分な特徴点を認識できず、 3Dモデルの表示位置の固定や移動時のトラッキングが行えない場合があります。
また、大きな窓ガラスや鏡がそばにあると反射の影響で特徴点の認識にブレが生じます。
| ・一面単色の壁 | 特徴点がない |
| ・凹凸やディテールの少ない環境 | 特徴点が少ない |
| ・十分な明るさが無い部屋 | 特徴点を認識できない |
| ・大きな窓ガラスや鏡 | 特徴点を誤認識する |
| ・遠景や空 | 対象が遠いため特徴点の変化がない |
空間を明るくする・物を置きディテールを増やす・近くにある物を画面に収める、等によって安定性が向上します。
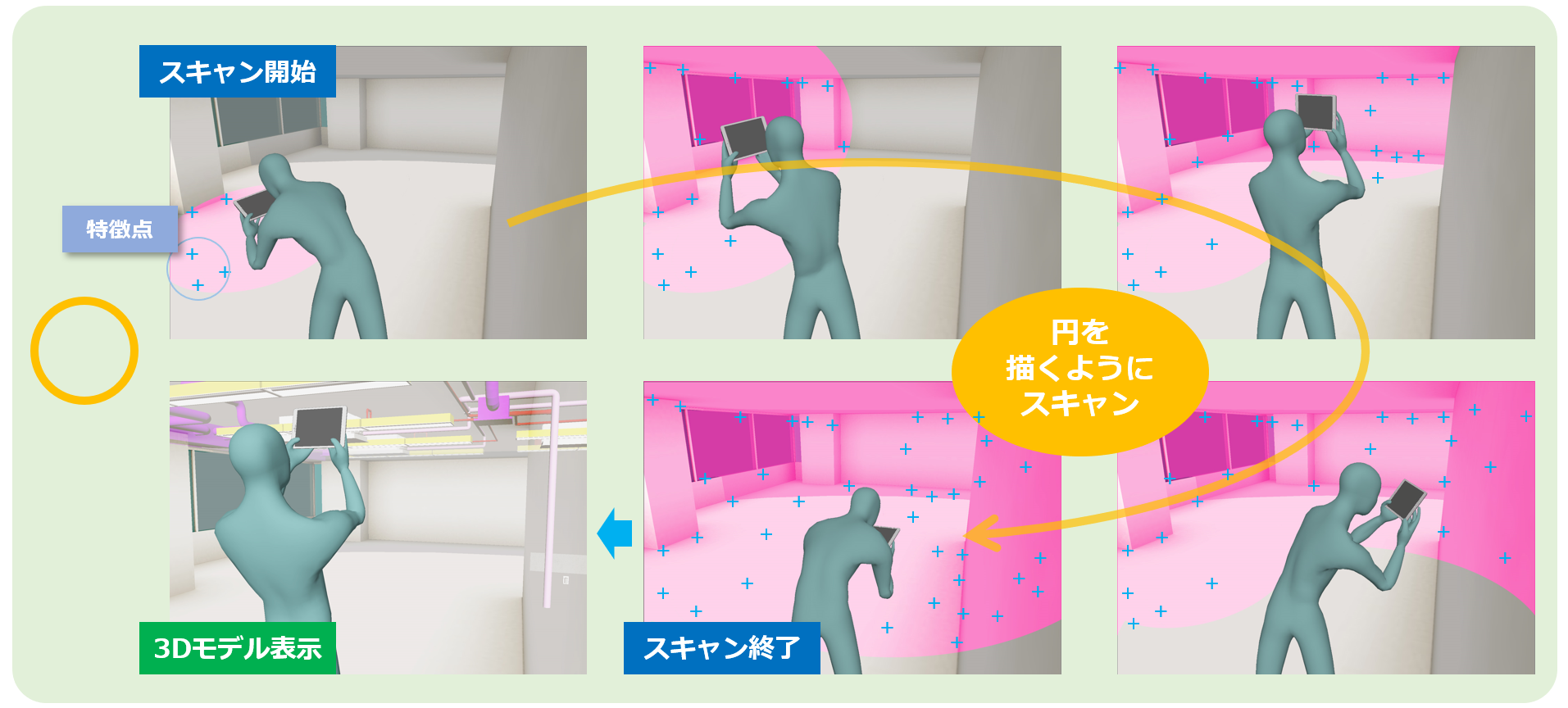
2. デバイスで空間全体をスキャンしましょう
3Dモデル配置前に、デバイスのカメラを周囲に向けてゆっくり回すことで特徴点が収集・記憶されるので、3Dモデル表示後の位置ずれを緩和することができます。
3. ARマーカーは見たいエリアと利用者の間に配置しましょう
ARマーカーは見たいエリアと利用者の間に配置することで、ARマーカー認識後にデバイスを振る角度を抑えることができます。
ARマーカーを認識したときに画面内に表示した3Dモデルが見える位置・角度でARマーカーを設定しておくと、3Dモデルの表示位置や向きのずれが確認しやすくなります。
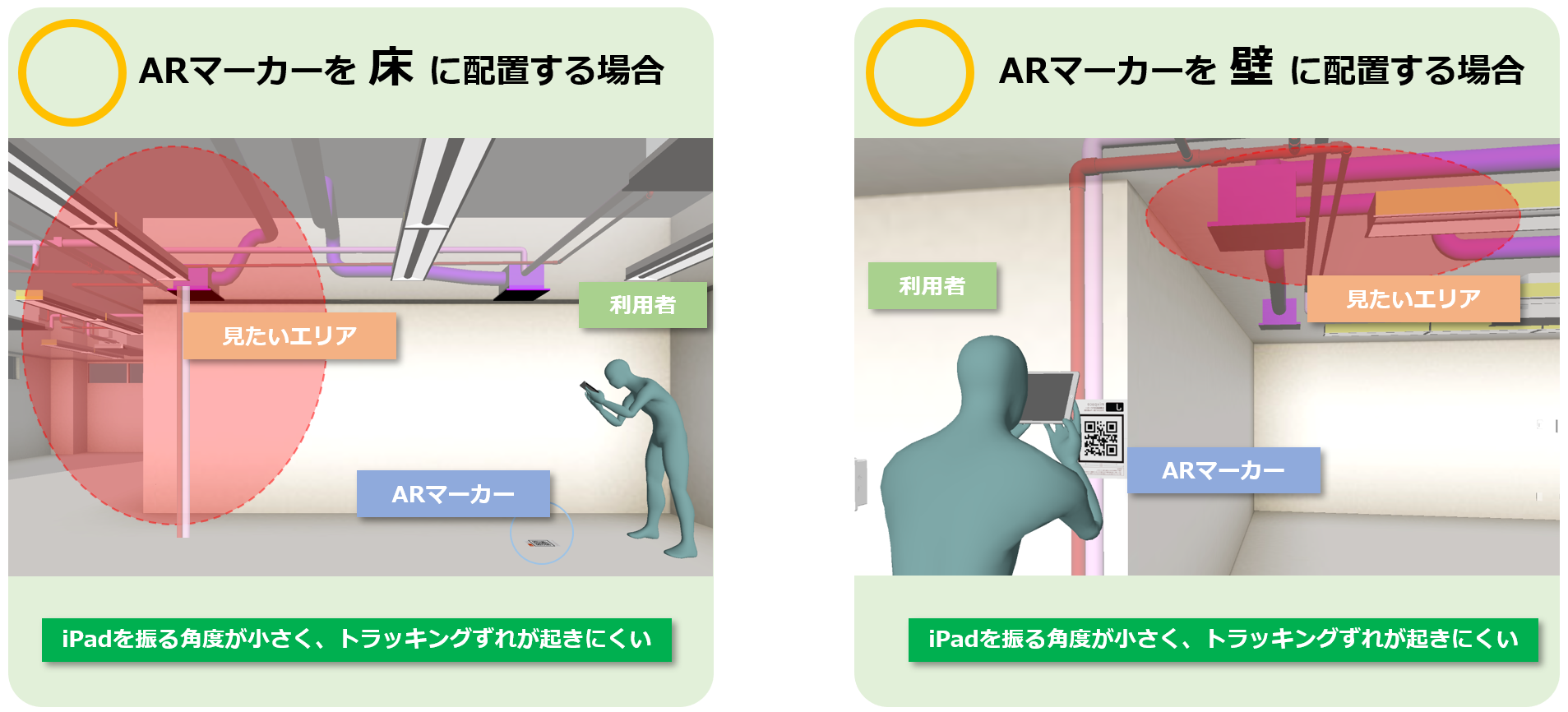
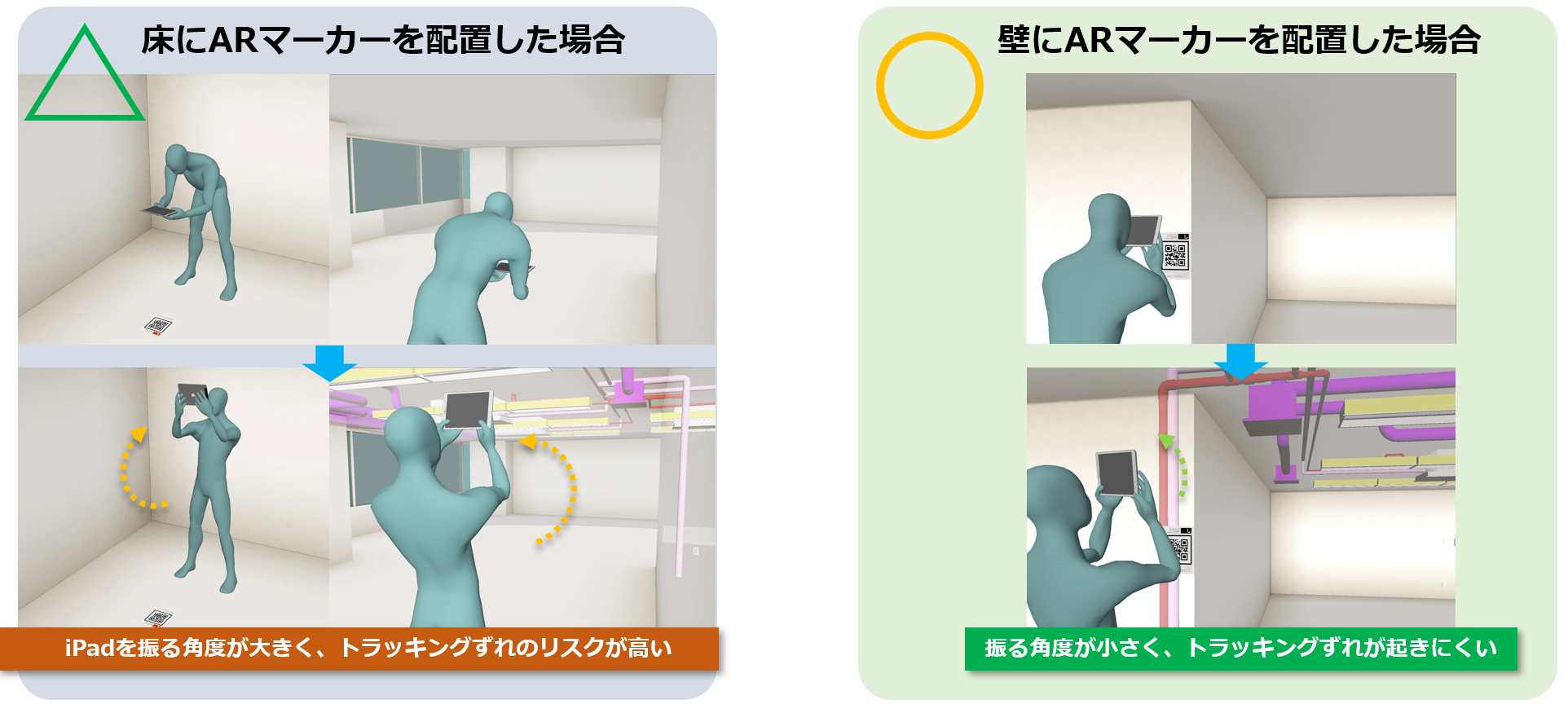
4. ARマーカーは壁に配置すると認識しやすくなります
目線より高く3Dモデルを表示する場合、壁にARマーカーを配置するとARマーカー認識時に表示された3Dモデルも画面内で同時に確認できます。
壁に配置するとARマーカー認識後のデバイスを振る角度も小さくてすみ、トラッキングずれを起こしにくくなります。
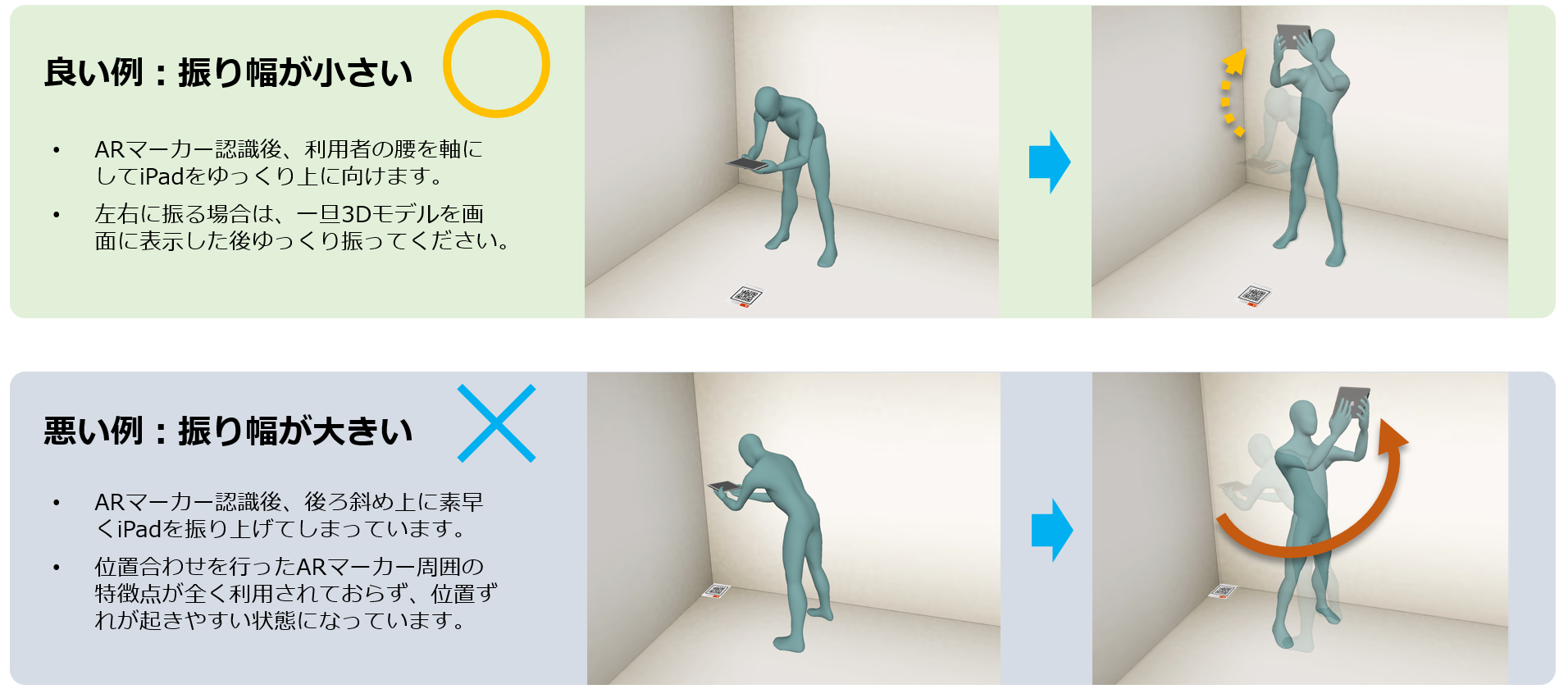
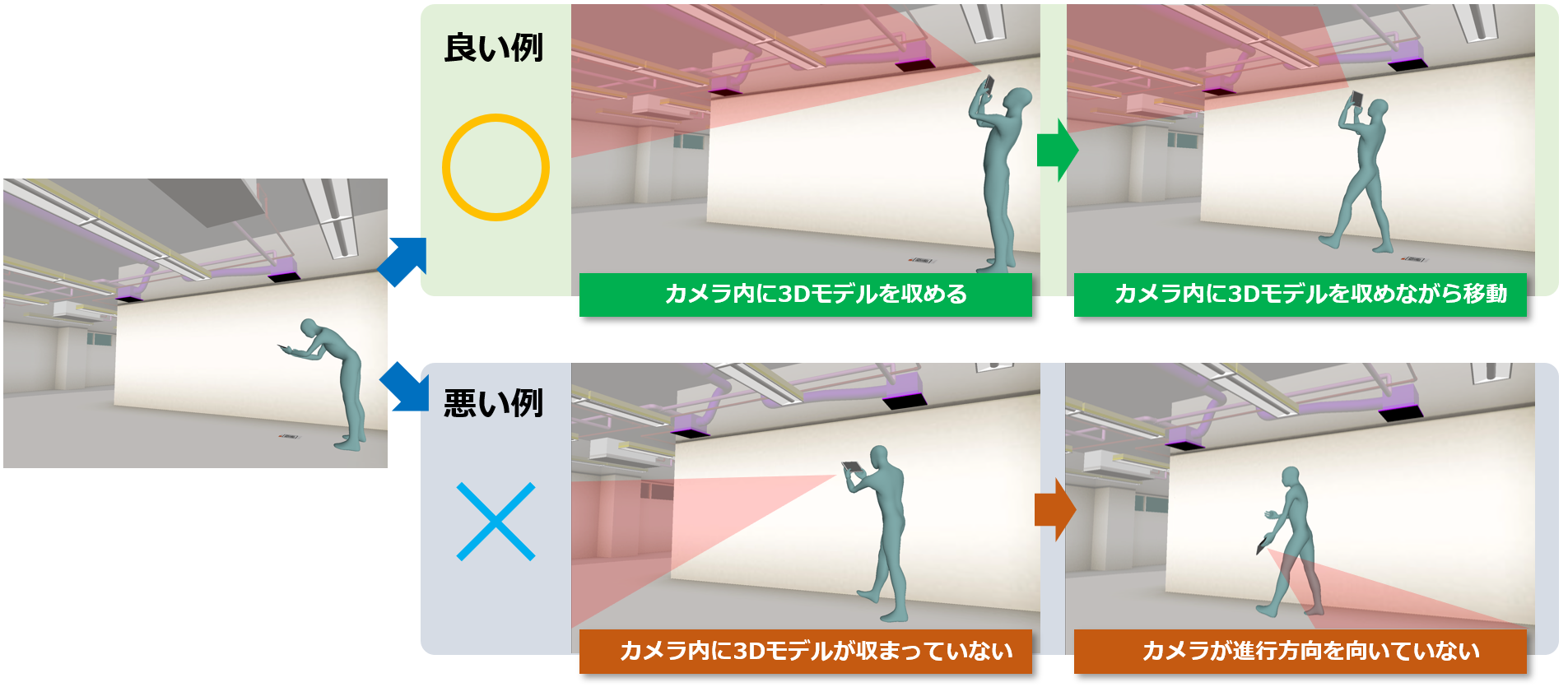
5. 3Dモデルをカメラに捉えながらゆっくり移動しましょう
デバイスを素早く、大きく振ってしまうとカメラが特徴点をとらえきれず、3Dモデルの表示位置ずれが発生しやすくなります。
デバイスを床に向けたり、人や車などの動く物体がカメラの視界を遮ると、位置トラッキングに必要な特徴点が認識できなくなり、3Dモデルの表示位置ずれが発生します。
デバイスのカメラが常に進行方向を向き、画面に3Dモデルが捉えられている状態でゆっくり移動してください。
6. 黒色の部分は透明になるので濃い灰色に置き換えましょう
HoloLens 2で表示されるホログラムは、現実世界からの光にHoloLens 2からの光を加えることによって作成されます。そのため、白は明るく見え、黒は光で表現が出来ないため肉眼で見たときは透明となる仕様となっています。
3Dモデル内に黒色を使用している場合は、その部分が透けて見えてしまうため非常に濃い灰色の RGB (16,16,16 など) にするなど調整してください。
7. 周辺環境が明るい場合は輝度を上げましょう
HoloLens 2で表示されるホログラムは、現実世界からの光にHoloLens 2からの光を加えることによって作成されます。そのため、周辺光の明るい環境下では表示した3Dモデルが見えにくくなります。その場合はデバイスの左側面にある輝度ボタンで輝度を上げてください。
その他、mixpaceのご利用でお困りの場合やご質問がございましたら「mixpaceサポートデスク」までご連絡ください。